در دنیای پیشرفته رباتیک، شاهد نوآوریهای چشمگیری هستیم که مرزهای سنتی طراحی و عملکرد را جابجا میکنند. ربات "آرگوس" (Argus) نمونهای برجسته از این تحولات است؛ رباتی که برخلاف همنوعان خود که از اشکال جانوری و انسانی الگوبرداری میکنند، با طرحی منحصر به فرد و کروی شکل، قابلیت تحرک و مانور بیسابقهای را به نمایش میگذارد. این ربات که توسط محققان دانشگاه دوک طراحی شده، فاقد ظاهر مشخص جلو و عقب است و با بهرهگیری از ۲۰ پایه تلسکوپی مجهز به دوربین، قادر به حرکت و پیشروی در جهات مختلف بدون نیاز به تغییر جهتگیری است. نام "آرگوس" که از اساطیر یونان باستان وام گرفته شده، به دلیل داشتن چشمانی فراوان (دوربینهای متعدد بر روی هر پایه)، به خوبی با قابلیت دید همهجانبه این ربات همخوانی دارد.
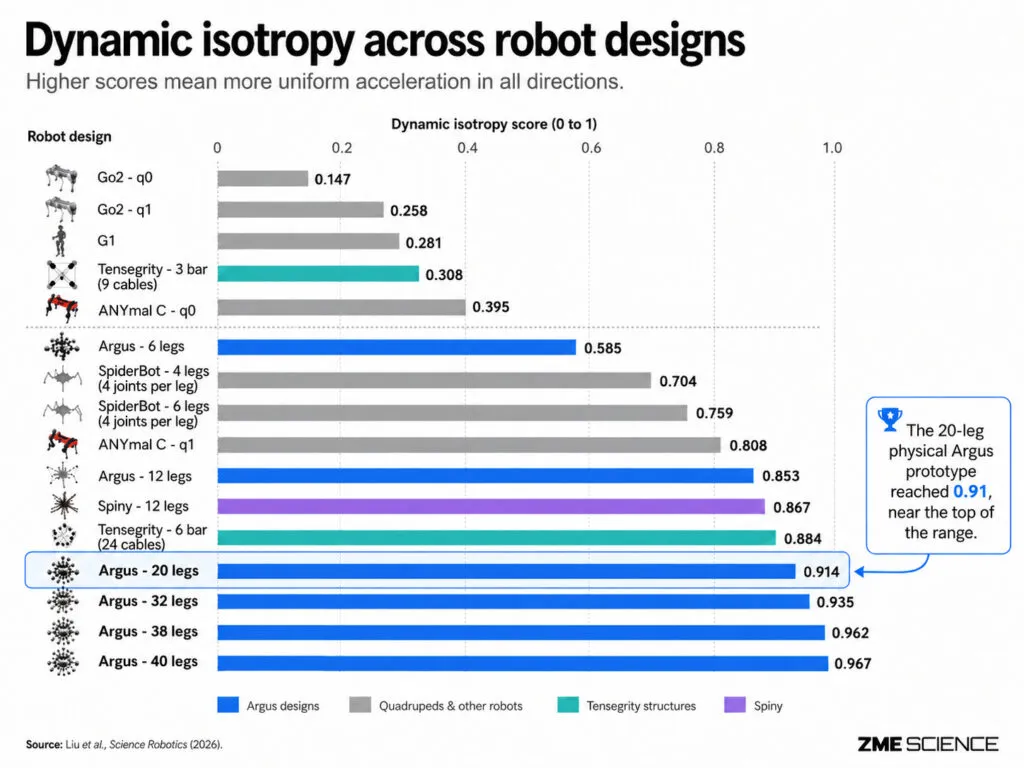
نوآوری اصلی آرگوس در رویکرد طراحی آن نهفته است. به جای تقلید از حرکات انسان، سگ یا حشرات، محققان بر "ایزوتوپی دینامیک" (Dynamic Isotropy) تمرکز کردهاند؛ معیاری که نشان میدهد ربات تا چه حد میتواند نیروی یکنواختی را در تمام جهات اعمال کرده، شتاب بگیرد و تعادل خود را حفظ کند. این اصل به ربات اجازه میدهد تا بدون نگرانی در مورد جهتگیری خود، در محیطهای پیچیده و ناهموار به فعالیت بپردازد. این دیدگاه رادیکال، پتانسیل ایجاد نسل جدیدی از رباتهای بسیار چابک و سازگار را فراهم میکند که قادر به فعالیت در محیطهایی فراتر از آزمایشگاههای کنترلشده هستند.
نوآوری در طراحی و مفهوم ایزوتوپی دینامیک
طراحی رباتها تا پیش از این عمدتاً از طبیعت الهام گرفته شده بود. رباتهای انساننما از اندامهای انسان، رباتهای چهارپا از حیواناتی چون سگ و اسب، و رباتهای کوچک از حشرات الگوبرداری میکردند. این رویکرد اگرچه ماشینهای چشمگیری را به ارمغان آورده، اما یک سوگیری ذاتی را نیز به همراه داشت: انتخاب الگوی حرکتی بر اساس شباهت به یک موجود خاص و با در نظر گرفتن ماموریت ربات. در مقابل، تیم دانشگاه دوک سوال متفاوتی را مطرح کردند: "چه قالبی برای ربات ایدهآل است که بتواند در تمام جهات به یک اندازه عمل کند؟"
مفهوم "ایزوتوپی دینامیک" پاسخی به این پرسش است. این معیار، توانایی ربات در شتابدهی به مرکز ثقل خود را در هر جهتی اندازهگیری میکند. تحقیقات نشان میدهد که بسیاری از رباتهای پیشرفته امروزی، از جمله رباتهای چهارپا، انساننما و پهپادهای متعارف، امتیازی کمتر از ۰.۶ را در این مقیاس کسب میکنند. اما آرگوس، با طراحی نوآورانهاش، امتیازی قابل توجه معادل ۰.۹۱ را به خود اختصاص داده است. این دستاورد، نشاندهنده قابلیت بینظیر آرگوس در اجرای حرکات متوازن و قدرتمند در تمامی جهات است.
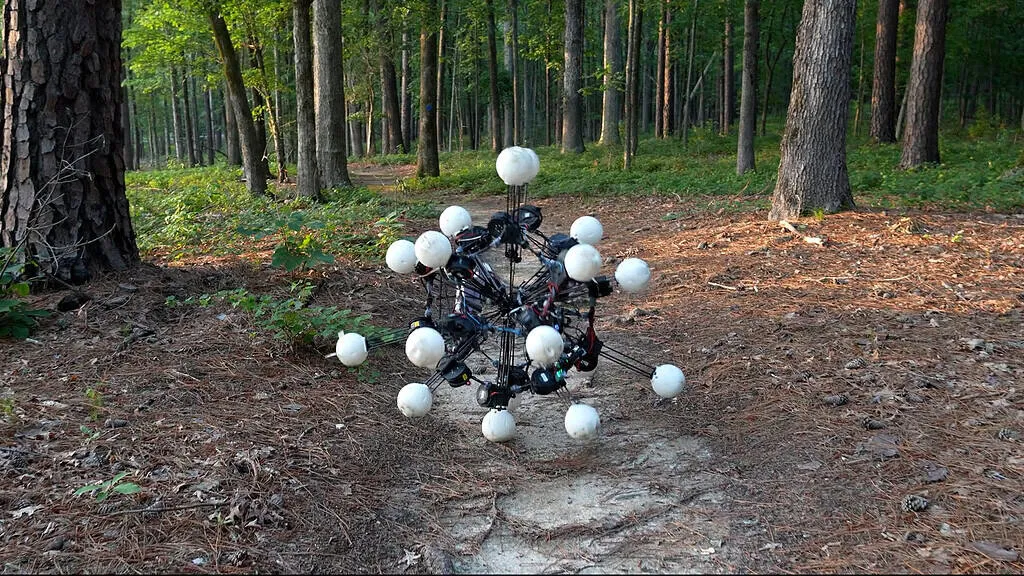
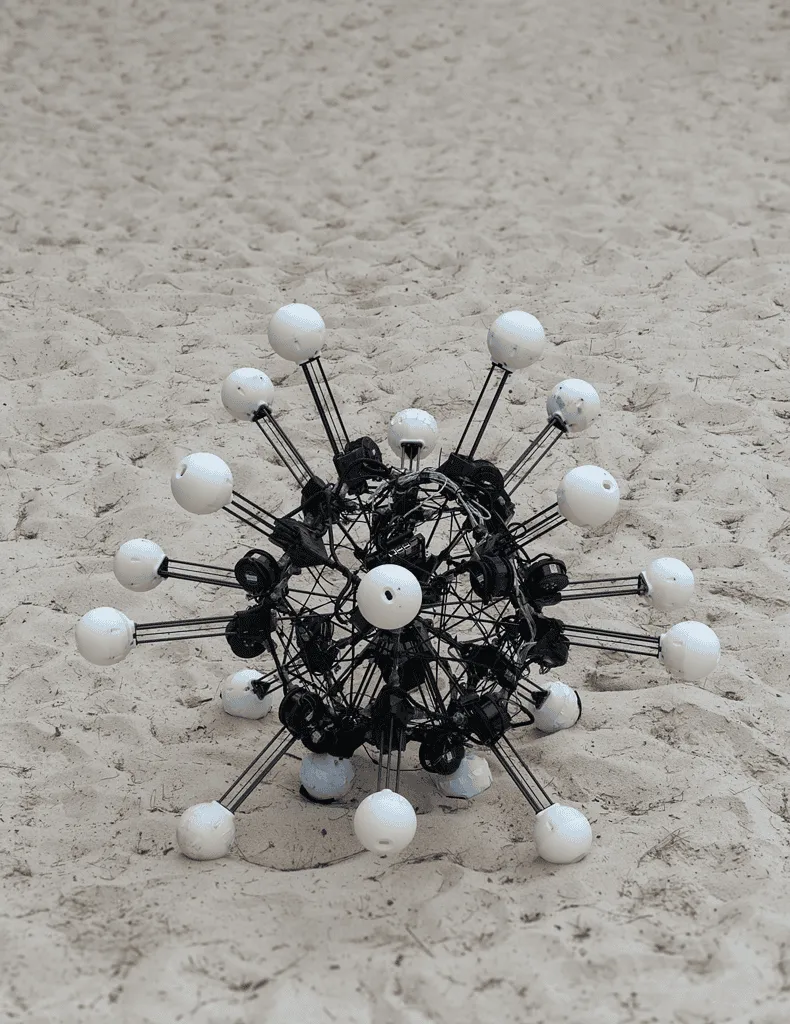
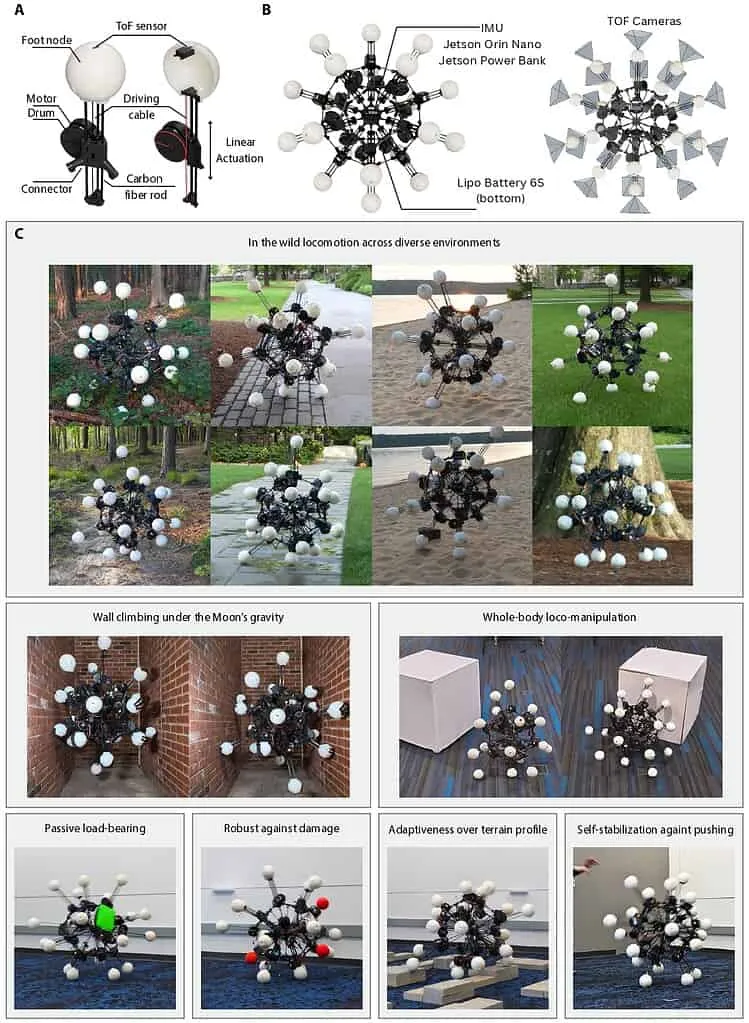
برای دستیابی به چنین قابلیتی، تیم تحقیقاتی بیش از ۱۵۰۰ طرح شبیهسازی شده را مورد بررسی قرار دادند. طرح نهایی شامل ۲۰ پایه خطی مشابه است که به صورت کابلدار به یک قاب مرکزی با ساختار دوازدهوجهی منتظم متصل شدهاند؛ ساختاری شبیه به خارداریان دریایی که پایهها به سمت بیرون از مرکز امتداد یافتهاند. هر پایه مجهز به دوربین عمقسنج است که دیدی سهبعدی و ۳۶۰ درجه از محیط اطراف را فراهم میآورد. این طراحی منحصر به فرد، آرگوس را قادر میسازد تا بدون نیاز به چرخش، مسیر خود را در میان موانع پیدا کند و با محیط اطراف خود تعامل داشته باشد.
قابلیتهای عملیاتی و چالشهای پیش رو
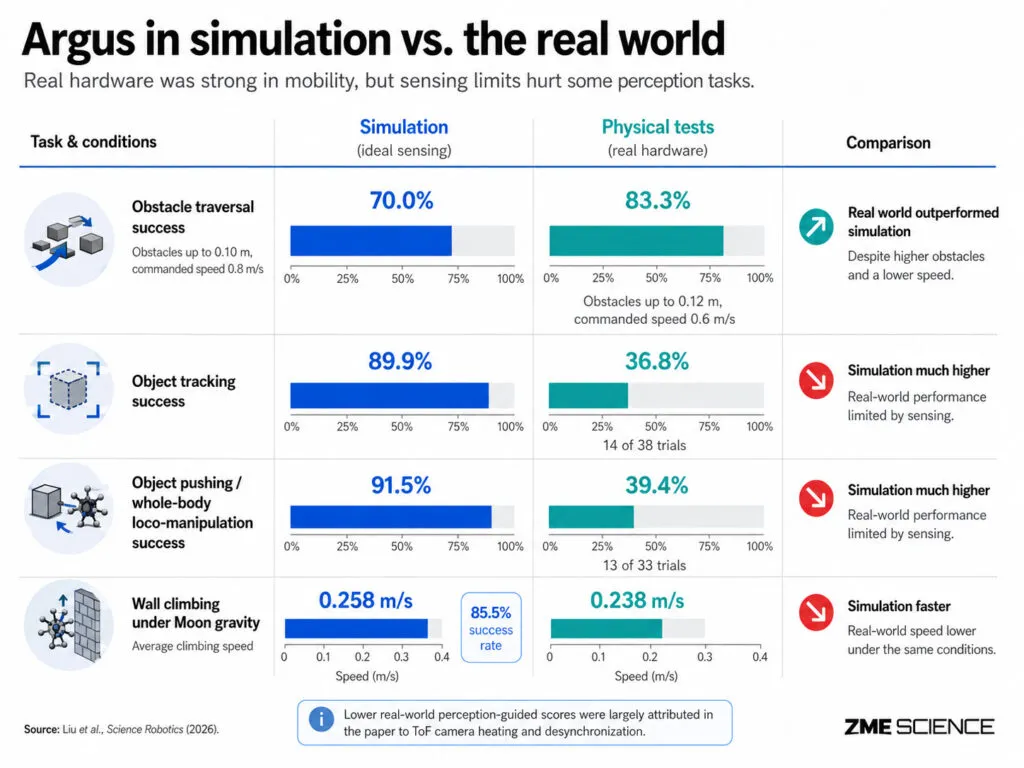
آرگوس در تستهای میدانی، توانایی خود را در عبور از سطوح مختلف از جمله بتن، چمن، خاک، پوشش گیاهی انبوه، شن نرم و سطوح خیس و لغزنده به اثبات رسانده است. این ربات قادر به عبور از موانعی با ارتفاع تقریبی ۱۳ سانتیمتر است و حتی در صورت غیرفعال شدن یک، دو یا حتی سه پایه، به حرکت خود ادامه میدهد. علاوه بر این، آرگوس میتواند محمولهای به وزن ۴.۵ کیلوگرم را در یک سمت بدنه خود حمل کرده و تقریباً تمام سرعت برنامهریزی شده را حفظ کند. در مواجهه با ضربه، به جای واژگونی، با گسترش پایههای سمت مخالف، تعادل خود را حفظ میکند.
در سناریوهای شبیهسازی شده صعود از دیوار در شرایط گرانش قمری، آرگوس با استفاده از برخی پایهها برای ایجاد فشار بر دیوارهای موازی و از برخی دیگر برای حرکت رو به بالا، عملکرد چشمگیری از خود نشان داد. دوربینهای عمقسنج تعبیه شده در پایههای آرگوس، تصویری تقریبی از محیط سهبعدی اطراف ربات ترسیم میکنند، بدون توجه به چرخش آن. این قابلیت، امکان ردیابی و هل دادن یک مکعب یک متری را فراهم میکند؛ عملی که برای رباتهایی با ساختار ثابت در جلو، چالشبرانگیز است.
با این حال، آرگوس هنوز برای عملیات در مناطق فاجعهزده یا اکتشافات فضایی آماده نیست. در تستهای ردیابی و جابجایی اشیاء در دنیای واقعی، نرخ موفقیت آن به طور قابل توجهی کاهش یافت. دلیل اصلی این امر، گرم شدن بیش از حد دوربینهای زمان پرواز (Time-of-Flight) و عدم همگامسازی آنها در طول آزمایشهای مکرر بود. پیچیدگی آرگوس، با داشتن پایههای متعدد، افزایش وزن، نیاز به کنترل بیشتر و قطعات بیشتر برای خرابی، چالشهای عملیاتی خود را دارد.
محققان به این مبادلات اذعان دارند و تاکید میکنند که هدف اصلی، صرفاً ساخت رباتی شبیه به آرگوس نیست، بلکه معرفی یک معیار سنجش جدید برای طراحی رباتها است. آنها در تلاشند تا شکاف بین عملکرد شبیهسازی شده و عملکرد واقعی را کاهش دهند. "آرگوس گواهی بر امکانپذیری است،" بیان میکند باکسیا شیا، یکی از نویسندگان اصلی مقاله. "این ربات نشان میدهد که طراحی بر اساس تقارن دینامیک، صرفاً یک کنجکاوی نظری نیست، بلکه میتواند رباتی تولید کند که در محیطهای واقعی، زمینهای ناهموار و حتی در شرایط گرانش کم، قابل استفاده باشد. این طراحی، افقهای جدیدی را در حوزه رباتیک میگشاید."
تحلیل تأثیر
دستاورد دانشگاه دوک با معرفی ربات آرگوس، تغییری پارادایم در حوزه طراحی رباتیک محسوب میشود. این پروژه نشان میدهد که تقلید صرف از طبیعت، تنها یکی از مسیرهای پیشرفت نیست و میتوان با تکیه بر اصول فیزیکی و ریاضی، به راهحلهای نوآورانهتری دست یافت. مفهوم ایزوتوپی دینامیک، ابزاری قدرتمند برای ارزیابی و بهینهسازی عملکرد رباتها در محیطهای چالشبرانگیز فراهم میآورد. با توجه به نیاز روزافزون به رباتهایی که بتوانند در شرایط دشوار و غیرقابل پیشبینی عملیات انجام دهند، رویکردی مانند آرگوس میتواند راه را برای توسعه رباتهایی با قابلیت سازگاری و تابآوری بسیار بالاتر هموار سازد. این امر به ویژه در صنایعی چون جستجو و نجات، کاوشهای معدنی، کشاورزی دقیق و اکتشافات فضایی اهمیت بسزایی خواهد داشت.