
در دنیای پرشتاب رباتیک، همیشه الهامبخش اصلی، طبیعت بوده است. دانشمندان رباتهای خود را شبیه انسانها، سگها، حشرات و حتی اسبها ساختهاند. اما تحقیقات جدید نشان میدهد که شاید بهترین فرم بدنه ربات، شباهتی به موجوداتی چون توتیای دریایی داشته باشد. یک ربات ۲۰-پا که به تازگی توسط محققان دانشگاه دوک توسعه یافته، با طراحی منحصر به فرد خود، دیدگاه سنتی درباره بهینهسازی فرم بدنه رباتها را به چالش کشیده است.
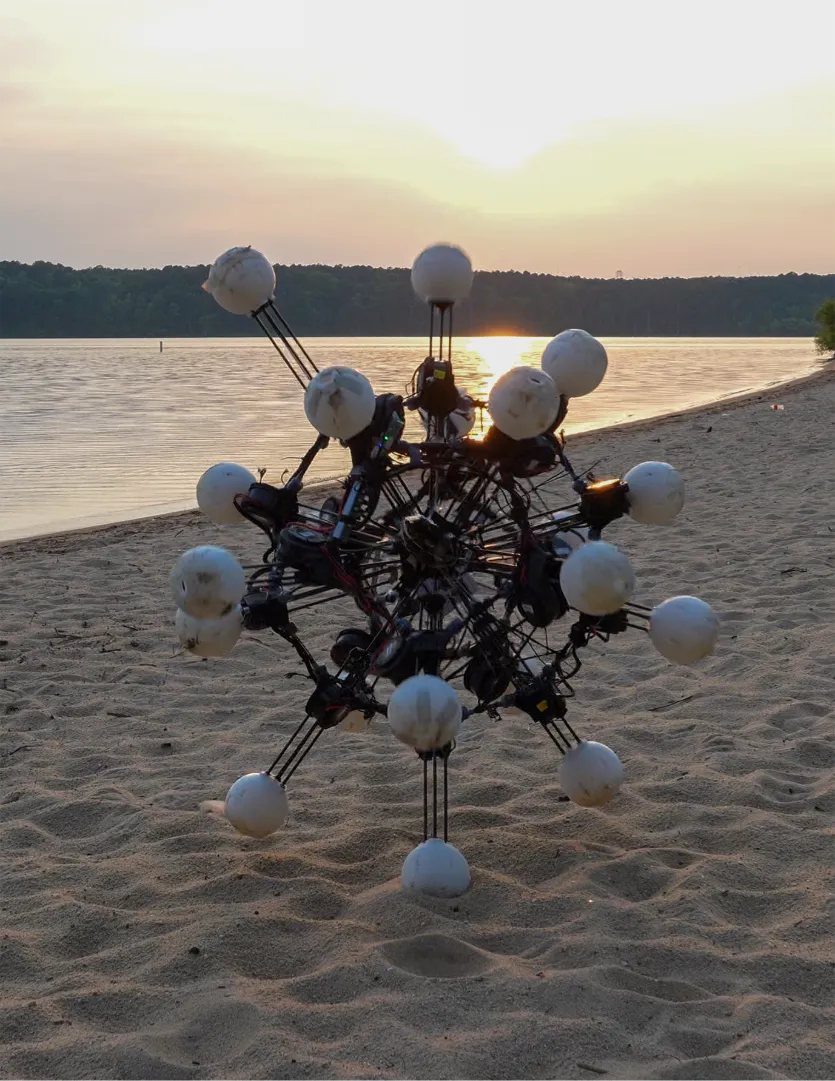
این ربات که «آرگوس» نام گرفته، فاقد جلو و عقب مشخص است و ۲۰ پای تلسکوپی دارد که از بدنه مرکزی آن منشعب میشوند. هر پا مجهز به یک دوربین عمقی است و همین امر، نامگذاری آن را بر اساس هیولای همهچشم یونان باستان توجیه میکند. این طراحی نوآورانه به آرگوس اجازه میدهد تا در هر جهتی حرکت کند، پس از برخورد تعادل خود را حفظ کند، از زمینهای ناهموار عبور کند، محمولهای تا وزن ۴.۵ کیلوگرم را حمل نماید و حتی از دیوارها بالا برود. انتشار نتایج این تحقیق در مجله معتبر Science Robotics، نقطه عطفی در طراحی رباتهای همهکاره محسوب میشود.
طراحی مبتنی بر تقارن پویا
تیم تحقیقاتی دانشگاه دوک پس از اجرای بیش از ۱۵۰۰ شبیهسازی از اشکال مختلف ربات، به طرح نهایی آرگوس دست یافت. تمرکز اصلی آنها نه بر تقلید از حیوانات، بلکه بر مفهوم «ایزوتوپی پویای» (Dynamic Isotropy) بود. این معیار، میزان شتابدهی متقارن و یکنواخت بدنه ربات در تمام جهات را اندازهگیری میکند. رباتی با امتیاز ۱ در این معیار، قادر است واکنشها و حرکات کاملاً یکسانی را در هر جهت از خود نشان دهد.
امتیاز آرگوس در این آزمون، ۰.۹۱ بود که به حد تئوری نزدیک است. این بدان معناست که ربات نیازی به جهتگیری خاصی رو به جهان ندارد و حرکت به جلو، عقب، چپ و راست برای آن تفاوت چندانی ندارد. این ویژگی، کنترل ربات را به کلی دگرگون میکند. برخلاف بسیاری از رباتهای پیشرفته امروزی که امتیازهای پایینتر از ۰.۶ دارند و در برخی جهات بهتر از جهات دیگر عمل میکنند، آرگوس به لطف ۲۰ پای خود، انعطافپذیری بیسابقهای را ارائه میدهد.
ساختار هندسی نوآورانه
برای دستیابی به این سطح از تقارن پویا، مهندسان دانشگاه دوک، بدنه آرگوس را بر اساس شکل «دوازدهوجهی منتظم» (Regular Dodecahedron) طراحی کردند؛ یک ساختار سهبعدی با ۱۲ وجه پنجضلعی. این آرایش هندسی، میدان دید تقریباً یکنواختی را برای ربات فراهم میکند و به آن اجازه میدهد بدون نیاز به جهتیابی مجدد، حرکت کند. این رویکرد نشان میدهد که تقلید صرف از طبیعت، تنها راه برای افزایش چابکی رباتها نیست، بلکه طراحی مبتنی بر اصول ریاضی و فیزیکی عمیقتر میتواند نتایج شگفتانگیزی به همراه داشته باشد.
آرگوس نه تنها در محیطهای آزمایشگاهی، بلکه در دنیای واقعی نیز توانمندیهای خود را به اثبات رسانده است. این ربات توانسته از سطوح ناهموار مانند ساحل شنی، چمن، پوشش گیاهی انبوه، سطوح خیس و حتی سنگفرشها عبور کند. این ربات قادر است موانعی به ارتفاع ۱۲.۷ سانتیمتر را پشت سر بگذارد و حتی در صورت آسیب دیدن سه پا، به حرکت خود ادامه دهد. توانایی هل دادن یک مکعب یک متری، نشاندهنده قدرت و پایداری بالای آن است.
اهمیت کاربردی و تحقیقاتی آرگوس
هرچند آرگوس در حال حاضر یک اثبات مفهوم (Proof of Concept) است و نه یک محصول نهایی، اما اهمیت آن فراتر از قابلیتهای عملیاتیاش است. این ربات میتواند به عنوان معیاری ریاضی برای مقایسه فرمهای مختلف بدنه رباتها و طراحی نسل جدیدی از ماشینهای همهکاره از پایه عمل کند. این پیشرفت، درهای جدیدی را به سوی کاربرد رباتها در محیطهای چالشبرانگیز، از جمله فضا با جاذبه کم، باز میکند.
محققان معتقدند که طراحی مبتنی بر تقارن پویا، تنها یک کنجکاوی نظری نیست، بلکه میتواند منجر به تولید رباتهایی شود که در طبیعت وحشی، زمینهای ناهموار و فضاهای پرتراکم قابل استقرار هستند. این نوآوری، دامنه کاربردهای رباتیک را به طور قابل توجهی گسترش میدهد و پتانسیل تغییر شکل مأموریتها و اکتشافات آینده را دارد.



