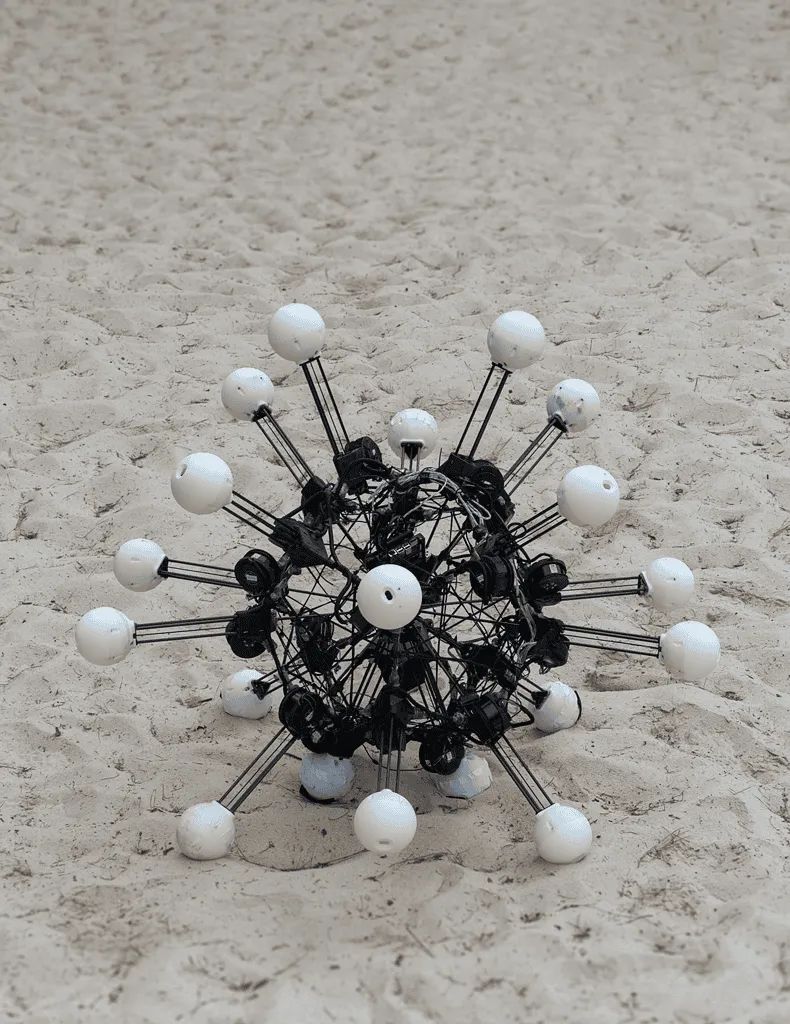
ربات «آرگوس» که توسط دانشگاه دوک طراحی شده، با ظاهری شبیه به توپ خاردار و 20 پای تلسکوپی، رویکردی نوین در طراحی رباتیک ارائه میدهد. این ربات که فاقد صورت مشخص است، برخلاف رباتهای مرسوم، بر اساس مفهوم «ایزوتروپی دینامیکی» طراحی شده است؛ به این معنی که میتواند به طور یکنواخت در تمام جهات شتاب بگیرد و حرکت کند. هر پای آرگوس مجهز به دوربین عمقسنج است که دید 360 درجهای فراهم میکند و به آن امکان میدهد در محیطهای ناهموار و بدون نیاز به چرخش، حرکت نماید.
آرگوس در آزمایشها توانسته است از موانع عبور کند، حتی با از کار افتادن برخی پاها به کار خود ادامه دهد و پایداری بالایی از خود نشان دهد. این طراحی نوآورانه، که از تقلید صرف از طبیعت فاصله گرفته و بر پایههای فیزیک و ریاضیات استوار است، چشمانداز جدیدی را برای رباتهایی که قرار است در محیطهای پیچیده و ناشناخته فعالیت کنند، ترسیم میکند. اگرچه چالشهایی مانند مدیریت گرما و پیچیدگی کنترلی همچنان وجود دارد، اما آرگوس اثبات میکند که آینده رباتیک میتواند فراتر از الگوهای زیستی باشد.




