مهندسان آلمانی با الهام از زیستشناسی شگفتانگیز سوسکمارمولک آفریقایی، نسل جدیدی از روباتهای کاوشگر برای سطح مریخ توسعه دادهاند. این روباتها به جای استفاده از چرخهای سنتی که ممکن است در شنهای روان مریخ گیر کنند، از حرکات موجی مشابه شنا در آب برای پیشروی در سطوح شنی استفاده میکنند. سوسکمارمولک (Scincus scincus)، که در صحرای بزرگ آفریقا یافت میشود، توانایی منحصربهفردی در "شنا کردن" درون شنها دارد و این مکانیزم حرکتی خارقالعاده، الهامبخش مهندسان برای حل چالشهای اکتشافات فضایی آینده در سیاره سرخ شده است.
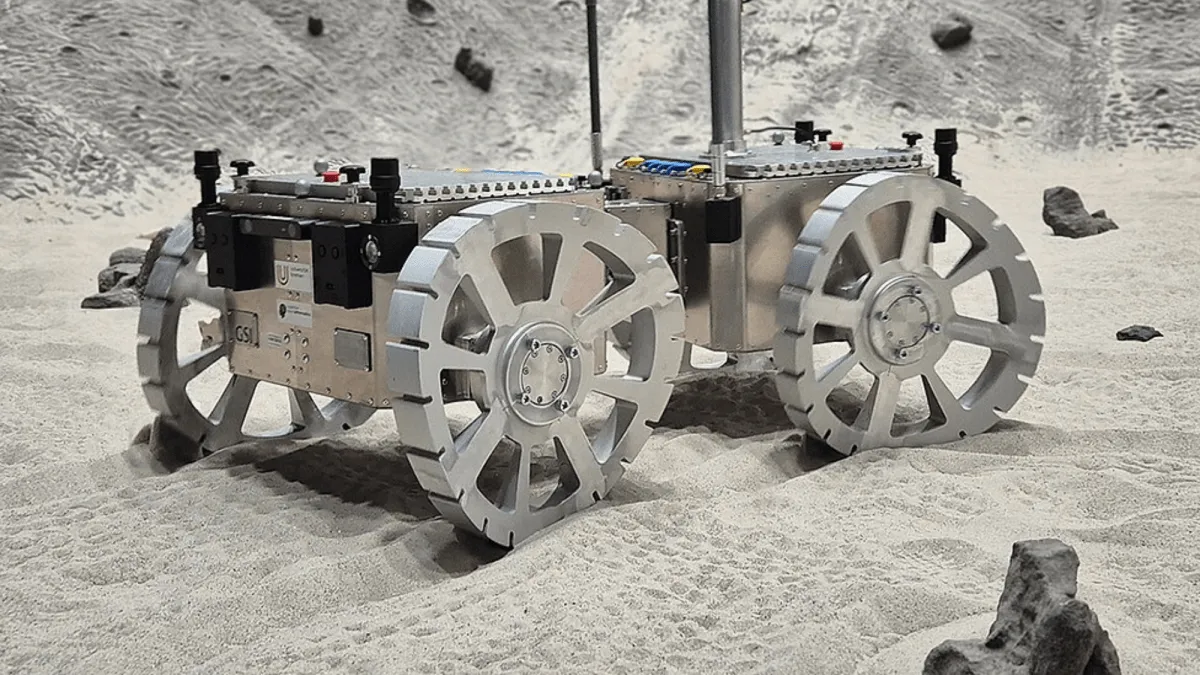
ویدیوی منتشر شده توسط دانشگاه وورتسبورگ، نمونه اولیهای از این روبات را در مقیاس کوچک نشان میدهد که در یک محفظه آزمایشی با شنهای شبیهسازی شده مریخی حرکت میکند. برخلاف روباتهای معمولی که با چرخش چرخها به جلو حرکت میکنند، هر یک از چهار چرخ این روبات جدید، حرکتی شبیه به عدد هشت انگلیسی را در شنها ایجاد کرده و با ایجاد نیروهای طولی و جانبی، روبات را به جلو میراند. این تکنیک نوآورانه، امکان عبور از ناهمواریها و غلبه بر سطوح نرم و ناپایدار را فراهم میآورد که چالش بزرگی برای روباتهای فعلی محسوب میشود.
حرکت موجی الهام گرفته از سوسکمارمولک
امنوئوسیس لوپز، پژوهشگر دانشگاه وورتسبورگ، در این باره توضیح میدهد: «چرخها تقلیدی از تعامل ویژه حیوان (سوسکمارمولک) با زمین هستند که هم نیروهای طولی و هم جانبی را تولید میکنند. روبات ردپاهایی سینوسی مانند در شنها به جا میگذارد.» این سیستم حرکتی نوین، کلیدی برای پیمایش مؤثر در محیطهای مملو از شن، مانند مریخ، محسوب میشود. چالش اصلی در حرکت روی سطح مریخ، ماهیت دوگانه شنهاست که گاهی مانند مادهای جامد و گاهی مانند مایعی روان عمل میکنند.
روباتهای کنونی که از چرخهای گرد یا نوارهای زنجیری استفاده میکنند، در مواجهه با شنهای نرم، سطوح شیبدار و زمینهای ناهموار مریخ، با مشکلاتی از قبیل عدم پایداری و گیر افتادن مواجه میشوند. این روبات جدید با الگوبرداری از حرکات طبیعی سوسکمارمولک، که با استفاده از حرکت قدرتمند و موجدار بدن خود در زیر شنها به جلو حرکت میکند، راهکاری نوین ارائه داده است. 
سوسکمارمولک: راهحل طبیعی برای غلبه بر شنهای لغزنده
سوسکمارمولک که بومی صحرای بزرگ آفریقاست، در دنیای بیرون از شنها با پاهای کوچک خود به سرعت حرکت میکند، اما زمانی که به زیر شنها میرود، رفتار آن کاملاً تغییر میکند. تصاویر اشعه ایکس نشان میدهند که این خزنده با ایجاد موجهایی قدرتمند در بدنش، نیروی پیشران لازم برای غلبه بر اصطکاک شن را ایجاد کرده و خود را به جلو میکشد؛ حرکتی که شباهت شگفتانگیزی به شنای ماهی در آب دارد. 
این توانایی منحصربهفرد، الهامبخش ساخت رباتهای شبیهساز شده توسط مهندسان در دانشگاه جورجیا تک در سال ۲۰۱۱ شد. آزمایشهای آنها نشان داد که شکل خاص سر این سوسکمارمولک نیز ممکن است در ایجاد نیروهای بالابری و تسهیل حرکت در شن مؤثر باشد. این یافتهها به مهندسان کمک کرد تا طراحی روباتهای خود را بهینهتر کنند. 
چالشها و پیشرفتهای روبات جدید
محققان گزارش دادهاند که ربات الهام گرفته از سوسکمارمولک، در مسیرهای آزمایشی شنی، عملکرد بهتری نسبت به نسخه چرخدار داشته است. در حالی که چرخهای گرد در شنها دچار لرزش و انحراف میشدند، چرخهای موجی این ربات، پایداری بیشتری از خود نشان دادند. با این حال، ساخت این روبات بدون چالش نبوده است؛ مدلهای اولیه به دلیل وزن زیاد، در شنها فرو میرفتند. تیم تحقیقاتی با افزایش عرض چرخها و کاهش جرم کلی روبات، نسخه بهبود یافتهای را توسعه دادند.
هرچند این فناوری هنوز در مراحل اولیه توسعه قرار دارد و برای استفاده عملی در مأموریتهای فضایی مانند کاوشگرهای ناسا، نیاز به تحقیقات بیشتری برای افزایش قابلیت کنترل و مدیریت لغزش در محیطهای پیچیده وجود دارد، اما نشاندهنده پتانسیل بالای الهامگیری از طبیعت برای حل مشکلات مهندسی است. اضافه شدن محفظه حمل ابزار علمی و بار نیز از دیگر چالشهایی است که باید در طراحیهای آینده مورد توجه قرار گیرد.
تحلیل تأثیر
توسعه این نوع روباتهای مریخی که از حرکات زیستی الهام گرفتهاند، میتواند انقلابی در نحوه اکتشاف سیارات شنی ایجاد کند. قابلیت عبور از موانع و پیشروی در شنهای روان، دسترسی به مناطق جدید و علمی را که پیش از این غیرممکن بود، فراهم میآورد. این پیشرفت همچنین نشاندهنده اهمیت مطالعات بیومیمتیک (تقلید از طبیعت) در حل چالشهای فنی پیچیده است و میتواند مسیر را برای نسلهای بعدی کاوشگرهای فضایی هموار سازد.